

商铺名称:厦门伊诗图电气有限公司
联系人:兰君佩(小姐)
联系手机:
固定电话:
企业邮箱:2586371817@qq.com
联系地址:厦门市思明区湖滨北路31号20E室
邮编:361006
联系我时,请说是在快能纺机网上看到的,谢谢!
商品详情
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上
EAMON/伊明牌JD高精密斜齿轮减速机:
一、全一体化设计,精度提高到大化。
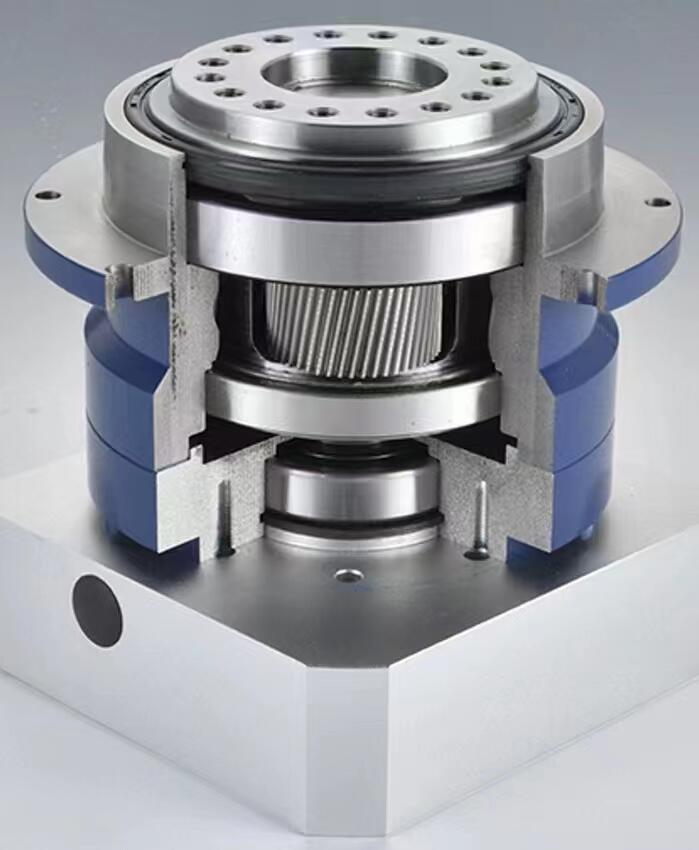
二、双支撑笼式行星架结构,拥有高可靠度,可适应频繁正反转。
三、斜齿传动,传动更平稳,更大的承载能力。
四、低回程间隙,定位更。
五、特殊转架结构,可以承载更大的径向力和轴向力。
规格范围:42-120。速比范围:3-100。精度范围:1-3arcmin(p1等级)、3-5arcmin(p2等级)
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上
AD140-L1-004-005-007-010-020-025-P1
AD140-L2-035-040-050-070-100-P1
AD140-L1-004-005-007-010-020-025-P2
AD140-L2-035-040-050-070-100-P2
AD200-L1-004-005-007-010-020-025-P1
AD200-L2-035-040-050-070-100-P1
AD200-L1-004-005-007-010-020-025-P2
AD200-L2-035-040-050-070-100-P2
AD255-L1-004-005-007-010-020-025-P1
AD255-L2-035-040-050-070-100-P1
AD255-L1-004-005-007-010-020-025-P2
AD255-L2-035-040-050-070-100-P2
ADR064-L1-004-005-007-010-014-020-P1
ADR064-L1-004-005-007-010-014-020-P2
ADR064-L2-020-025-035-040-P1
ADR064-L2-050-070-100-140-200-P1
ADR064-L2-020-025-035-040-P2
ADR064-L2-050-070-100-140-200-P2
ADR090-L1-004-005-007-010-014-020-P1
ADR090-L1-004-005-007-010-014-020-P2
ADR090-L2-020-025-035-040-P1
ADR090-L2-050-070-100-140-200-P1
ADR090-L2-020-025-035-040-P2
ADR090-L2-050-070-100-140-200-P2
ADR110-L1-004-005-007-010-014-020-P1
ADR110-L1-004-005-007-010-014-020-P2
ADR110-L2-020-025-035-040-P1
ADR110-L2-050-070-100-140-200-P1
ADR110-L2-020-025-035-040-P2
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上
减速机是一种常见的传动机械,它能够将高速旋转的输入轴的运动减速到低速旋转的输出轴。在减速机的工作过程中,传动比是一个非常重要的参数,它表示输入轴和输出轴的转速比。本文将介绍减速机传动比的输出与输入的对应公式。
首先,我们需要了解减速机的传动原理。减速机通常由一系列齿轮组成,这些齿轮可以是圆柱齿轮、蜗轮蜗杆齿轮等。在减速机工作时,输入轴的旋转运动通过齿轮传递给输出轴,从而实现减速。为了计算输出轴的转速,我们需要使用传动比公式来计算。
传动比公式是指输入轴转速与输出轴转速之间的比值。具体来说,传动比(i)等于输出轴转速(n2)除以输入轴转速(n1)。这个公式可以表示为:i=n2/n1
。
需要注意的是,传动比是一个有方向的量,也就是说,当输入轴和输出轴的旋转方向相同时,传动比为正数;当输入轴和输出轴的旋转方向相反时,传动比为负数。
此外,我们还可以根据传动比和电机转速来计算减速机的输出转速。具体来说,输出转速(n2)等于电机转速(n1)乘以传动比(i)。这个公式可以表示为:n2=n1×i。
在实际应用中,我们可以根据需要选择不同类型的减速机,并使用这些公式来计算输出转速和传动比。例如,当我们需要将电机的高速旋转运动减速到低速旋转运动时,我们可以选择蜗轮蜗杆减速机或圆柱齿轮减速机等。
总之,减速机是一种常见的传动机械,它能够将高速旋转的输入轴的运动减速到低速旋转的输出轴。在使用减速机时,我们需要了解传动比的计算方法,并使用这些公式来计算输出转速和传动比。
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上
EAMON/伊明牌JD高精密斜齿轮减速机:
一、全一体化设计,精度提高到大化。
二、双支撑笼式行星架结构,拥有高可靠度,可适应频繁正反转。
三、斜齿传动,传动更平稳,更大的承载能力。
四、低回程间隙,定位更。
五、特殊转架结构,可以承载更大的径向力和轴向力。
规格范围:42-120。速比范围:3-100。精度范围:1-3arcmin(p1等级)、3-5arcmin(p2等级)
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上

AD140-L1-004-005-007-010-020-025-P1
AD140-L2-035-040-050-070-100-P1
AD140-L1-004-005-007-010-020-025-P2
AD140-L2-035-040-050-070-100-P2
AD200-L1-004-005-007-010-020-025-P1
AD200-L2-035-040-050-070-100-P1
AD200-L1-004-005-007-010-020-025-P2
AD200-L2-035-040-050-070-100-P2
AD255-L1-004-005-007-010-020-025-P1
AD255-L2-035-040-050-070-100-P1
AD255-L1-004-005-007-010-020-025-P2
AD255-L2-035-040-050-070-100-P2
ADR064-L1-004-005-007-010-014-020-P1
ADR064-L1-004-005-007-010-014-020-P2
ADR064-L2-020-025-035-040-P1
ADR064-L2-050-070-100-140-200-P1
ADR064-L2-020-025-035-040-P2
ADR064-L2-050-070-100-140-200-P2
ADR090-L1-004-005-007-010-014-020-P1
ADR090-L1-004-005-007-010-014-020-P2
ADR090-L2-020-025-035-040-P1
ADR090-L2-050-070-100-140-200-P1
ADR090-L2-020-025-035-040-P2
ADR090-L2-050-070-100-140-200-P2
ADR110-L1-004-005-007-010-014-020-P1
ADR110-L1-004-005-007-010-014-020-P2
ADR110-L2-020-025-035-040-P1
ADR110-L2-050-070-100-140-200-P1
ADR110-L2-020-025-035-040-P2
双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上

减速机是一种常见的传动机械,它能够将高速旋转的输入轴的运动减速到低速旋转的输出轴。在减速机的工作过程中,传动比是一个非常重要的参数,它表示输入轴和输出轴的转速比。本文将介绍减速机传动比的输出与输入的对应公式。
首先,我们需要了解减速机的传动原理。减速机通常由一系列齿轮组成,这些齿轮可以是圆柱齿轮、蜗轮蜗杆齿轮等。在减速机工作时,输入轴的旋转运动通过齿轮传递给输出轴,从而实现减速。为了计算输出轴的转速,我们需要使用传动比公式来计算。
传动比公式是指输入轴转速与输出轴转速之间的比值。具体来说,传动比(i)等于输出轴转速(n2)除以输入轴转速(n1)。这个公式可以表示为:i=n2/n1
。
需要注意的是,传动比是一个有方向的量,也就是说,当输入轴和输出轴的旋转方向相同时,传动比为正数;当输入轴和输出轴的旋转方向相反时,传动比为负数。
此外,我们还可以根据传动比和电机转速来计算减速机的输出转速。具体来说,输出转速(n2)等于电机转速(n1)乘以传动比(i)。这个公式可以表示为:n2=n1×i。
在实际应用中,我们可以根据需要选择不同类型的减速机,并使用这些公式来计算输出转速和传动比。例如,当我们需要将电机的高速旋转运动减速到低速旋转运动时,我们可以选择蜗轮蜗杆减速机或圆柱齿轮减速机等。
总之,减速机是一种常见的传动机械,它能够将高速旋转的输入轴的运动减速到低速旋转的输出轴。在使用减速机时,我们需要了解传动比的计算方法,并使用这些公式来计算输出转速和传动比。

双轴行星减速器ZJU32-60-2-35-P2-T1惠诚至上

